Hello!
I am a robot vision researcher interested in building object-centric 3D representations as the foundation for robot perception, reasoning, and action. My work focuses on developing robust spatial understanding, such as geometry, pose, physical properties, and dynamics models, in visually challenging environments by incorporating data-driven 3D priors and real-world structures, such as symmetry and physics. My goal is to enable efficient and generalizable robot operation in cluttered environments.
My research explores two main strategies to turn learning-based computer vision into robot vision:
- Leveraging symmetry as a strong prior for efficient and reliable world understanding.
- Test-time update of scene understanding through embodied interactions and physics-based reasoning.
I am currently a Postdoctoral Researcher at the GRASP Lab, University of Pennsylvania, advised by Michael Posa, and an Assistant Research Scientist at the University of Michigan, advised by Maani Ghaffari. I received my Ph.D. in Mechanical Engineering from the University of Michigan, advised by Huei Peng and Maani Ghaffari.
Please check out my Google Scholar page for the full list of my publications.
Selected Work
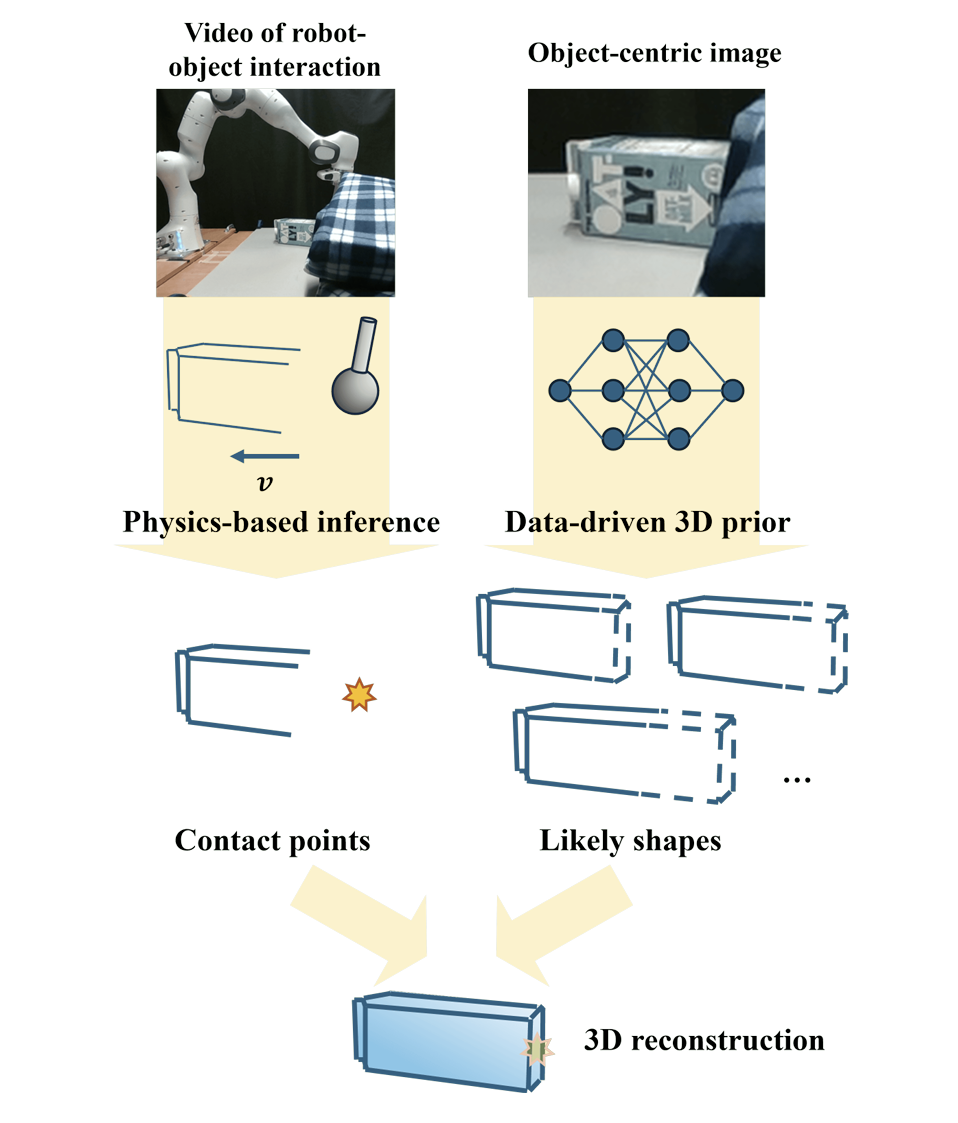
Object Reconstruction under Occlusion with Generative Priors and Contact-induced Constraints
Minghan Zhu, Zhiyi Wang, Qihang Sun, Maani Ghaffari, Michael Posa
Paper | Project
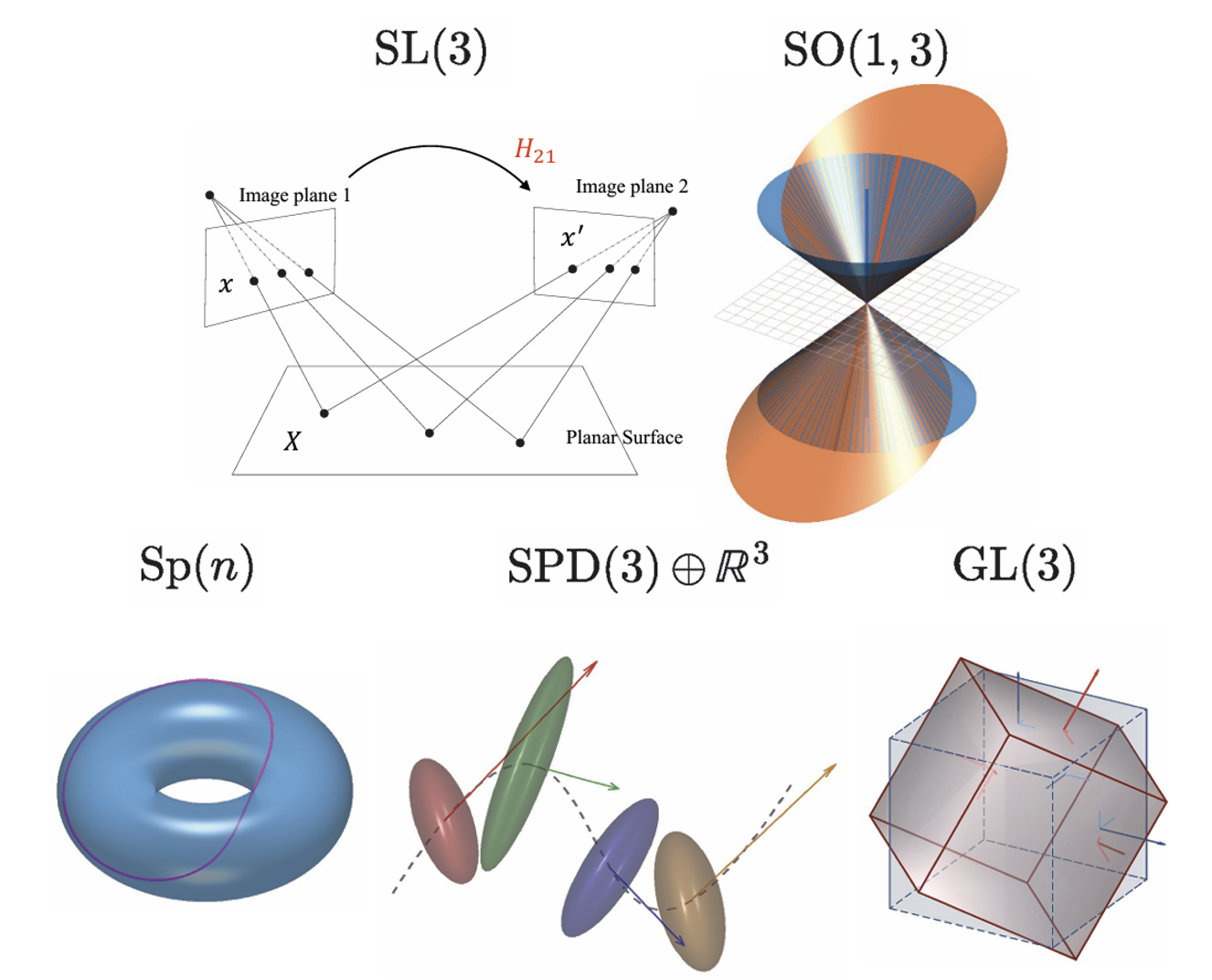
Equivariant Neural Networks for General Linear Symmetries on Lie Algebras
Chankyo Kim, Sicheng Zhao, Minghan Zhu, Tzu-Yuan Lin, Maani Ghaffari
Paper | Project
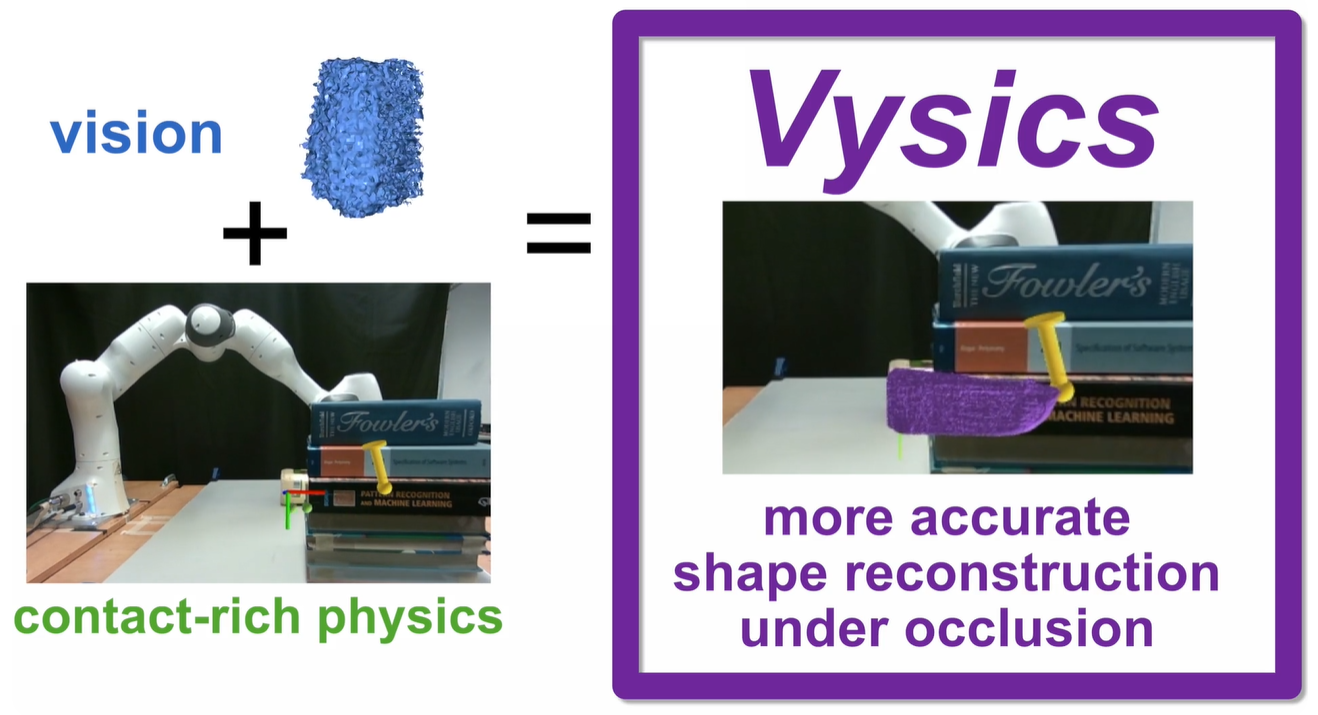
Vysics: Object Reconstruction Under Occlusion by Fusing Vision and Contact-Rich Physics
Bibit Bianchini*, Minghan Zhu*, Mengti Sun, Bowen Jiang, Camillo J. Taylor, Michael Posa
Robotics: Science and Systems (RSS), 2025
Paper | Project
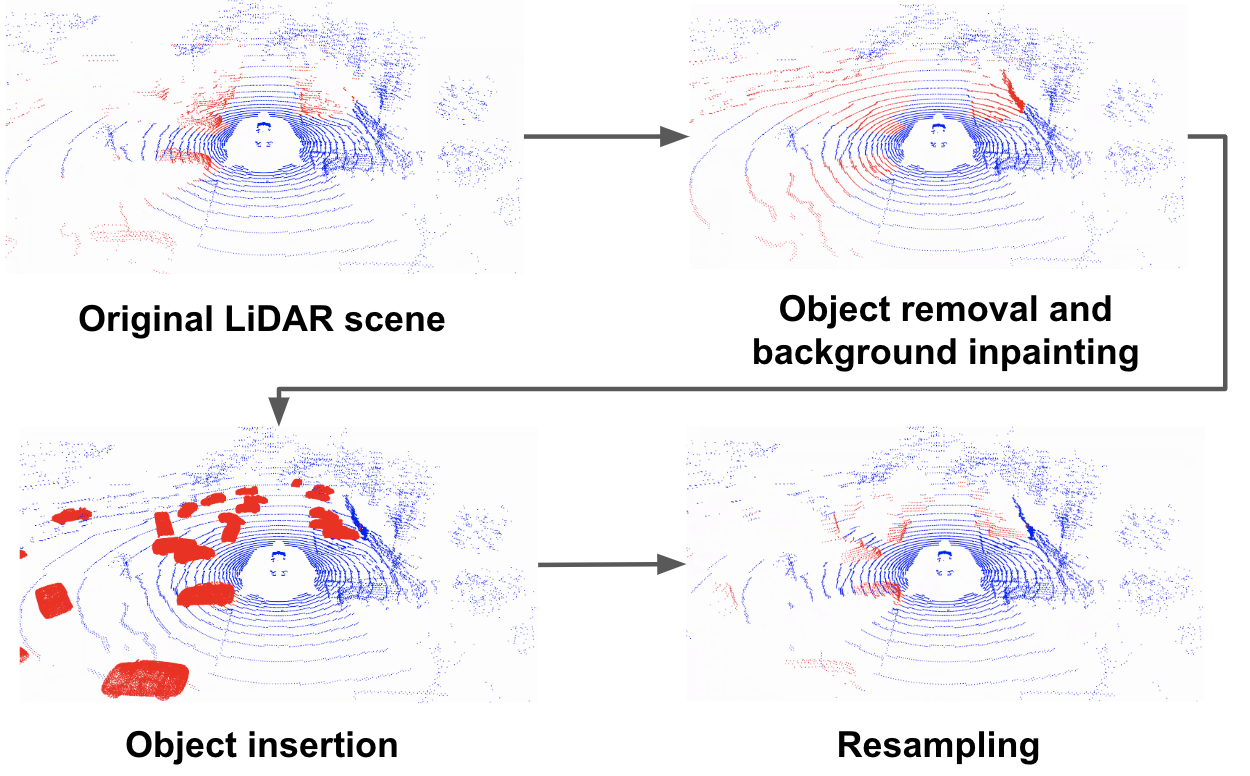
LiDAR-EDIT: LiDAR Data Generation by Editing the Object Layouts in Real-World Scenes
Shing-Hei Ho, Bao Thach, Minghan Zhu
IEEE International Conference on Robotics & Automation (ICRA), 2025
Paper | Project | Demo | Code
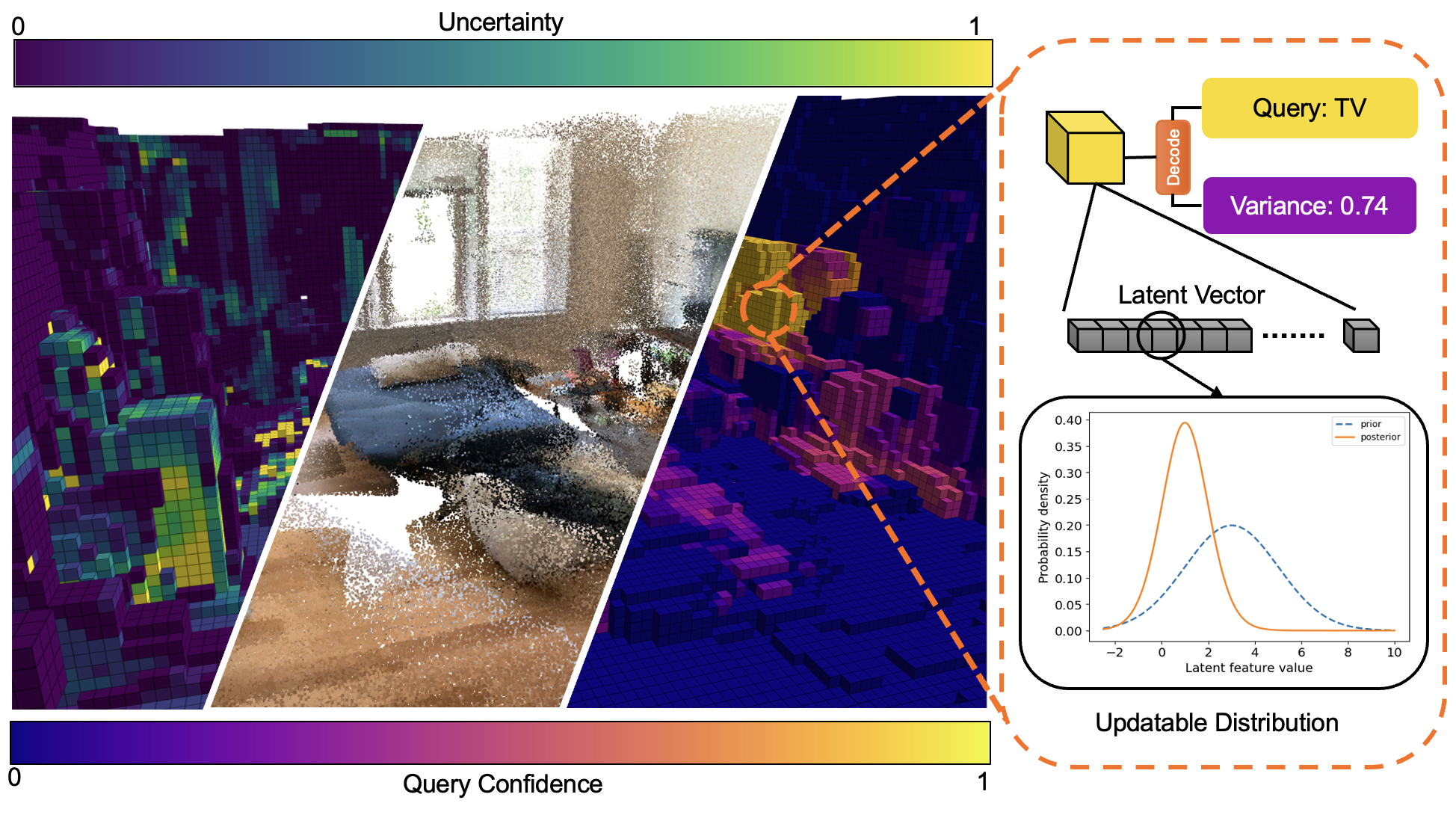
LatentBKI: Open-Dictionary Continuous Mapping in Visual-Language Latent Spaces With quantifiable uncertainty
Joey Wilson, Ruihan Xu, Yile Sun, Parker Ewen, Minghan Zhu, Kira Barton, Maani Ghaffari
IEEE Robotics and Automation Letters, 2025
Paper | Code
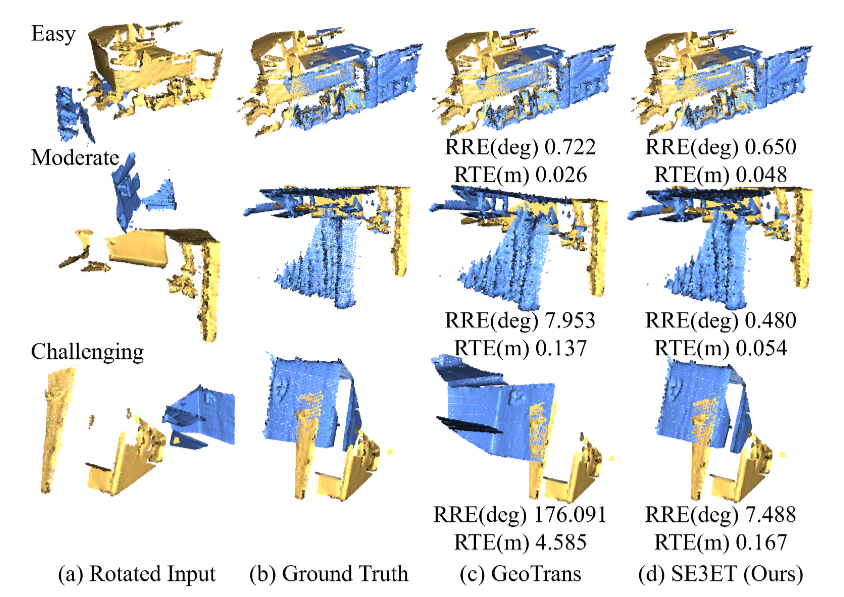
SE3ET: SE(3)-Equivariant Transformer for Low-Overlap Point Cloud Registration
Chien Erh Lin, Minghan Zhu, Maani Ghaffari
IEEE Robotics and Automation Letters, 2024
Paper | Code
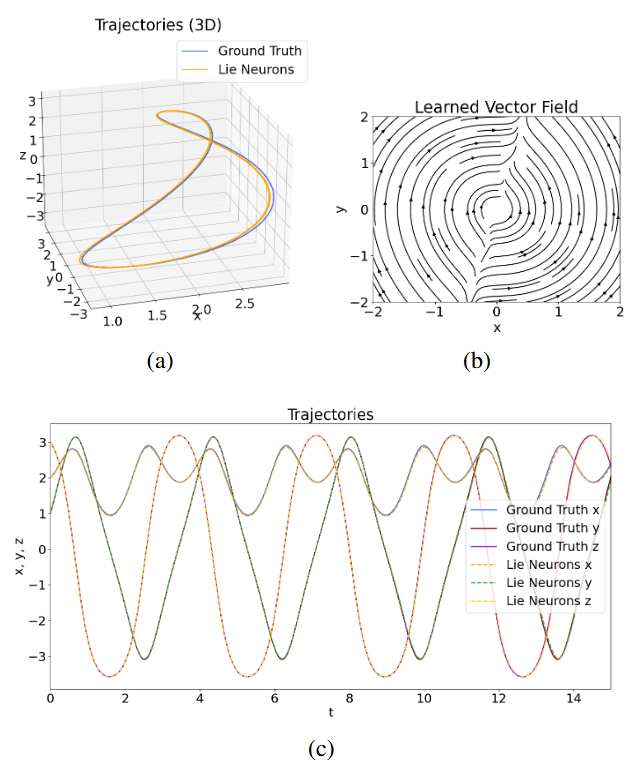
Lie Neurons: Adjoint-Equivariant Neural Networks for Semisimple Lie Algebras
Tzu-Yuan Lin*, Minghan Zhu*, Maani Ghaffari
International Conference on Machine Learning (ICML), 2024
Paper | Code
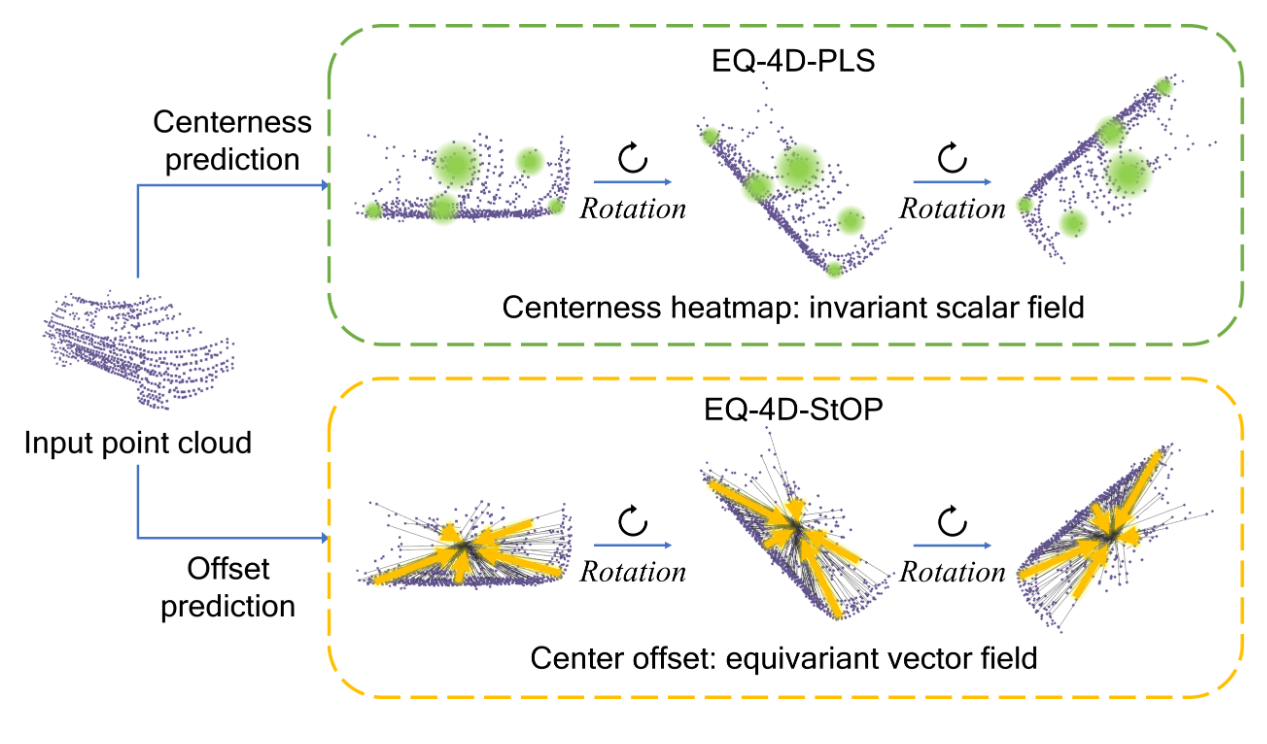
4D Panoptic Segmentation as Invariant and Equivariant Field Prediction
Minghan Zhu, Shizhong Han, Hong Cai, Shubhankar Borse, Maani Ghaffari, Fatih Porikli
IEEE/CVF International Conference on Computer Vision (ICCV), 2023
Paper | Code | Project
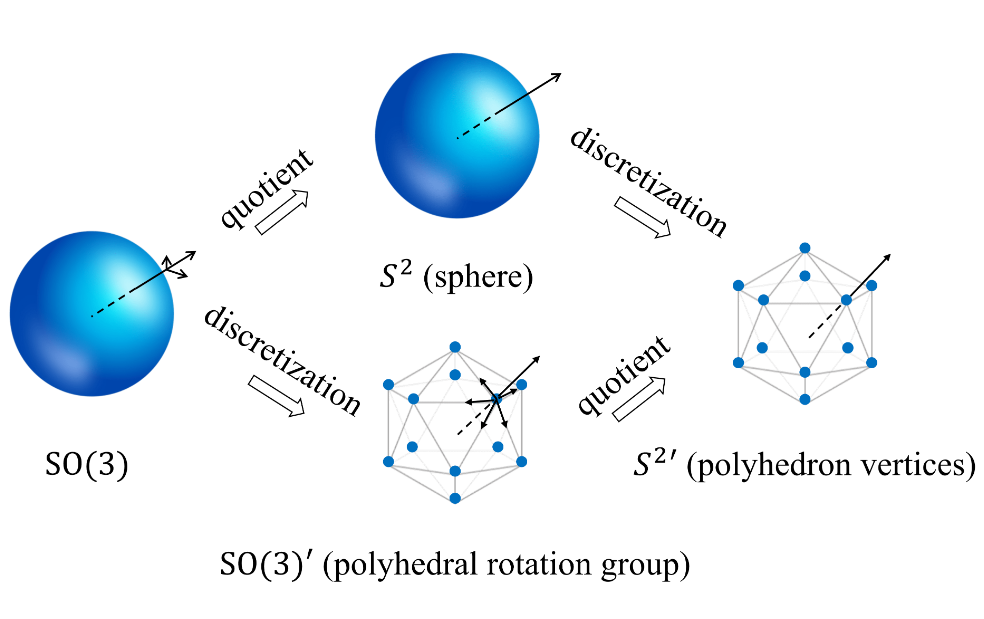
E2PN: Efficient SE(3)-Equivariant Point Network
Minghan Zhu, Maani Ghaffari, William A Clark, Huei Peng
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023
Paper | Code
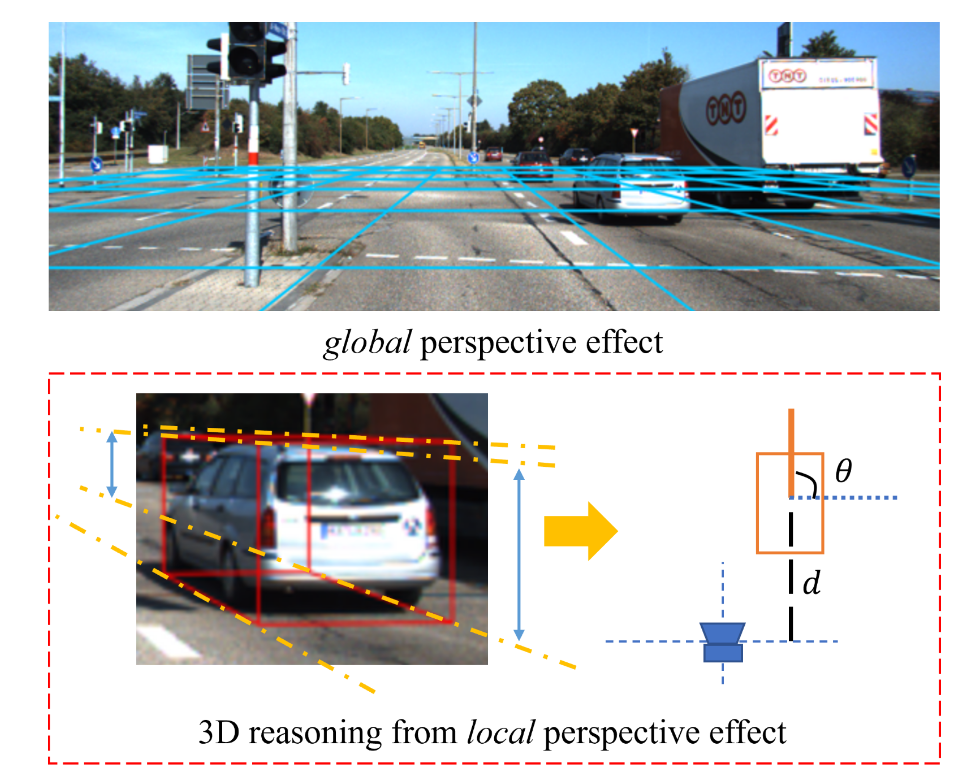
MonoEdge: Monocular 3D Object Detection Using Local Perspectives
Minghan Zhu, Lingting Ge, Panqu Wang, Huei Peng
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2023
Paper
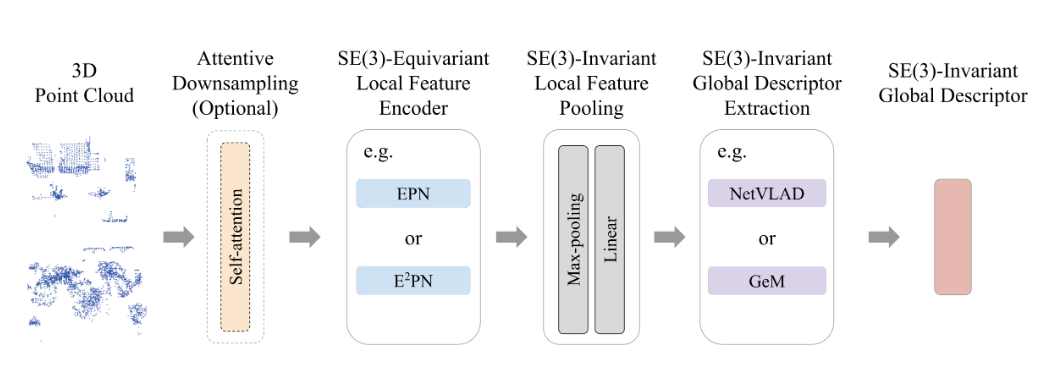
SE(3)-Equivariant Point Cloud-Based Place Recognition
Chien Erh Lin, Jingwei Song, Ray Zhang, Minghan Zhu, Maani Ghaffari
Conference on Robot Learning (CoRL), 2022,
Paper | Code
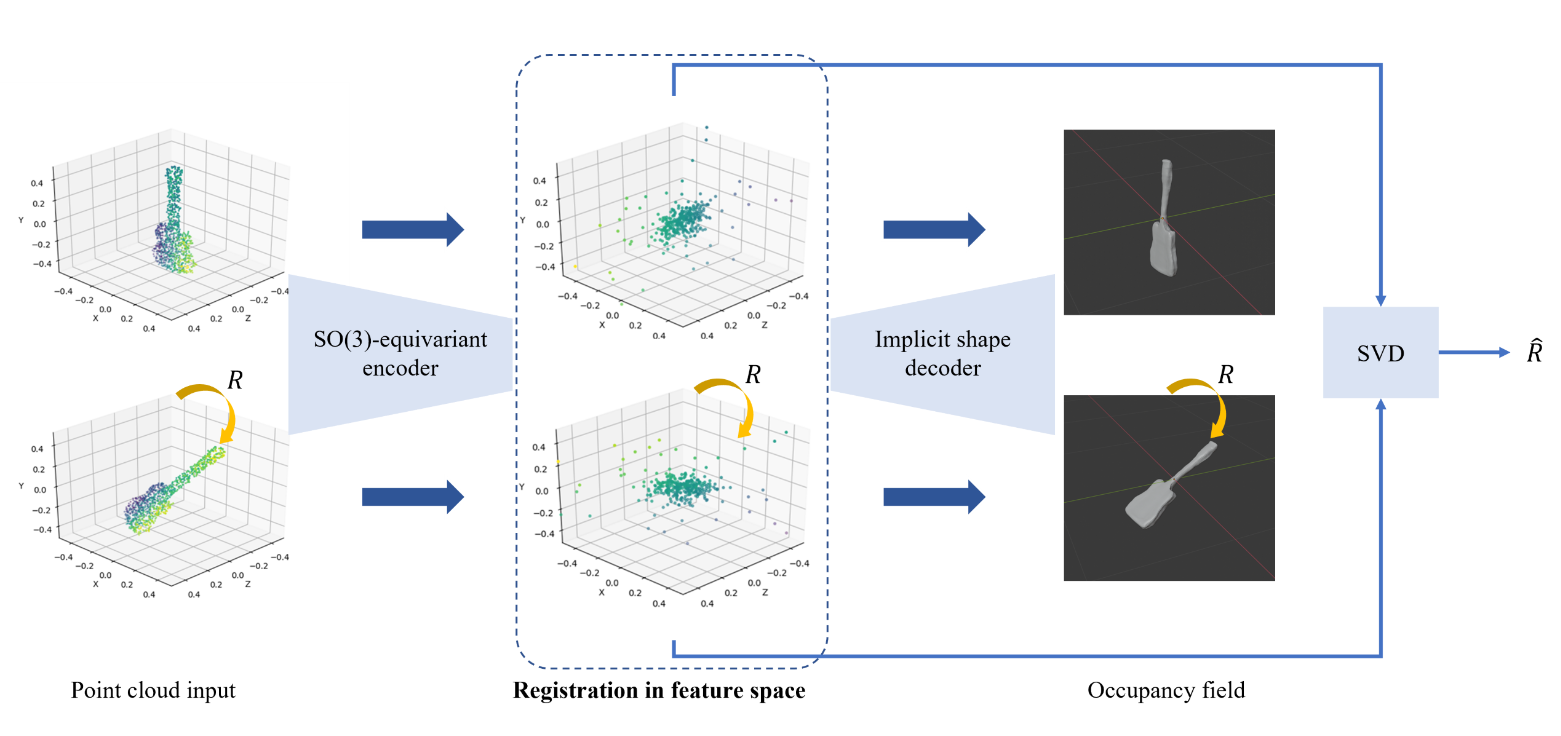
Correspondence-Free Point Cloud Registration with SO(3)-Equivariant Implicit Shape Representations
Minghan Zhu, Maani Ghaffari, Huei Peng
Conference on Robot Learning (CoRL), 2021,
Paper | Code
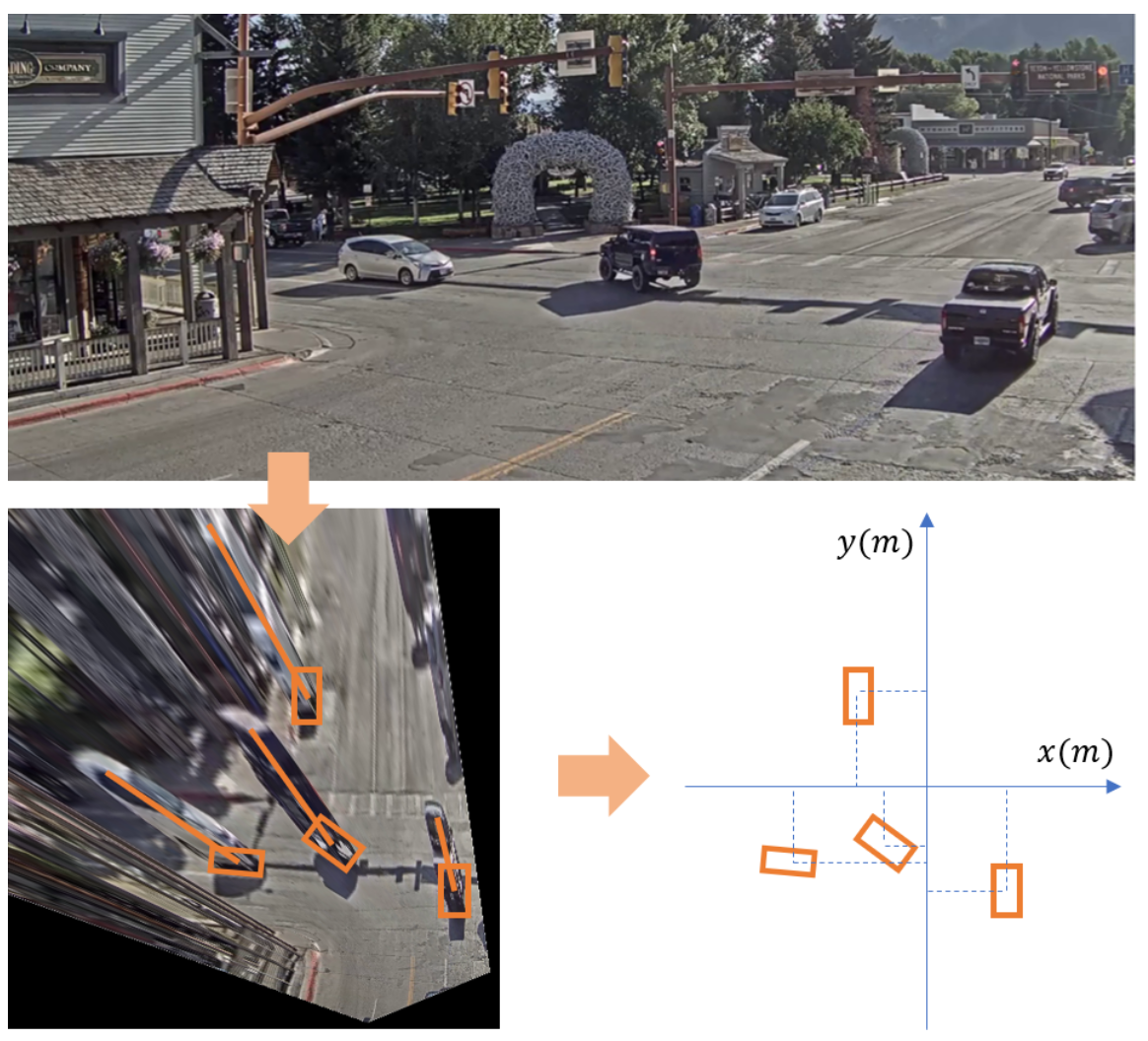
Monocular 3D Vehicle Detection Using Uncalibrated Traffic Cameras through Homography
Minghan Zhu, Songan Zhang, Yuanxin Zhong, Pingping Lu, Huei Peng, John Lenneman
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Paper | Code
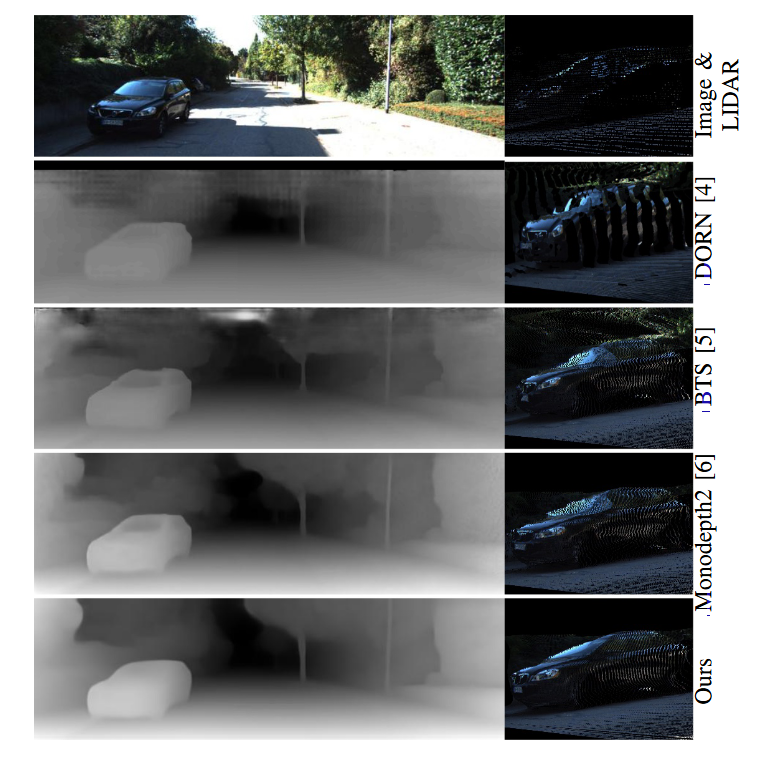
Monocular Depth Prediction through Continuous 3D Loss
Minghan Zhu, Maani Ghaffari, Yuanxin Zhong, Pingping Lu, Zhong Cao, Ryan M Eustice, Huei Peng
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Paper | Code